Dobladora de panells semiautomàtica EMBC 1402
especificació dels productes
| No. | Nom | Paràmetre | Unitat |
| 1 | Longitud màxima | 1400 | mm |
| 2 | Ample màx | 1400 | mm |
| 3 | Min.Longitud de flexió | 200 | mm |
| 4 | Amplada mínima de flexió | 260 | mm |
| 5 | Gruix màxim de flexió (MS, UTS410N/mm²) | 1 | mm |
| 6 | Gruix de flexió mínim (MS, UTS410N/mm²) | 0,5 | mm |
| 7 | Altura màxima de flexió | 170 | mm |
| 8 | Mode d'ajust de longitud de la premsa superior manual | ||
| 9 | Consum mitjà d'energia | 2.2 | KW |
| 10 | Pes | 15 | T |
Característiques i estructura principal
Pel que fa al disseny i fabricació de màquines, Hebei Hanzhi CNC Machinery Co., Ltd.se centra principalment en els punts següents:
1. Un concepte de màrqueting que persegueix la practicitat i estalvia a l'usuari cada cèntim.
2. Un concepte de disseny molt fiable i precís.
3. Matèries primeres d'alta qualitat, peces comprades i tècniques de processament exquisides.
4. Més èmfasi en la facilitat d'ús i manteniment i seguretat.
5. Baixa taxa de manteniment i cost de manteniment a la mateixa indústria.
marc
A. Construcció d'un model d'elements finits 3D: basant-se en el model sòlid 3D desenvolupat i dissenyat, es construeix un model d'elements finits dinàmic per als càlculs.El model considera els components principals de la connexió de transferència de força.Les forces es transfereixen al coixinet mitjançant la connexió i després es realitza l'anàlisi de la resistència del coixinet.
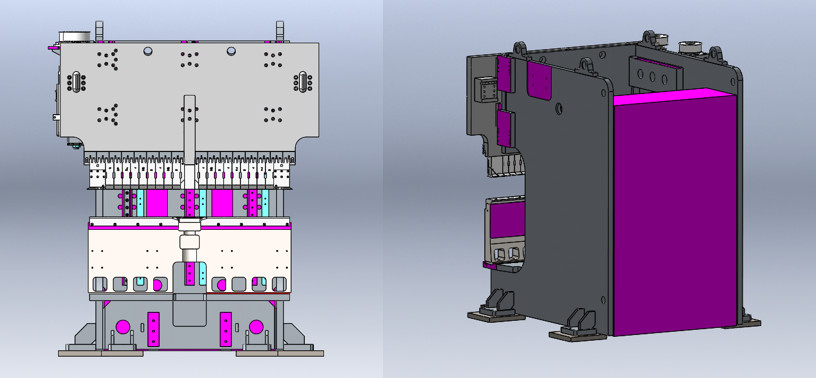
Fig. 1 Dobladora de panells Modelat dinàmic d'elements finits de màquina completa
B. Anàlisi de resultats de l'anàlisi estàtica: a causa de la baixa velocitat de mecanitzat, l'anàlisi de la resistència es pot reduir a un problema estàtic.En funció de la càrrega de compressió de la placa i la càrrega de flexió en la direcció vertical del capçal de tall, els resultats de la tensió i la deformació es mostren a continuació.La tensió màxima apareix a la gola del cos amb una tensió màxima de 21,2 mpa i la deformació màxima apareix a l'extrem superior del cos amb una deformació màxima de 0,30 mm.
Segons els resultats de l'anàlisi d'elements finits del marc, es va triar l'acer Q345 com a material;es va adoptar la soldadura de l'escut de diòxid de carboni;es va realitzar un tractament de tremp per eliminar les tensions generades per la soldadura;assegurant així la precisió, estabilitat i alta rigidesa de l'equip per a un funcionament a llarg termini.
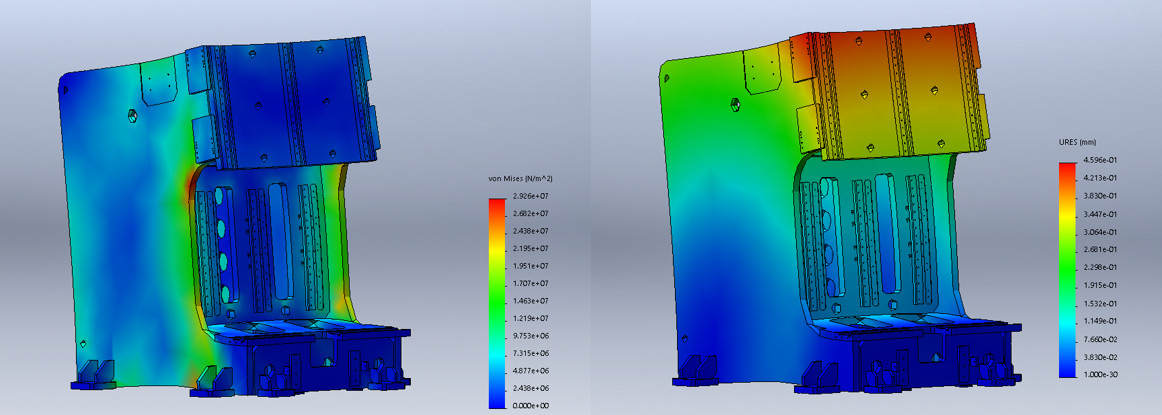
Fig. 2 resultats de l'anàlisi de deformació de desplaçament de tensió del bastidor
Ram superior
Aquesta part consisteix principalment en lliscant, cargol de parell elevat, reductor, guia guia, servomotor, etc.L'accionament principal està controlat per un servomotor i el mode de control és un control síncron servo, que pot garantir eficaçment la precisió de posicionament, la velocitat ràpida i l'alta controlabilitat.La lubricació del cargol de plom i el carril de guia adopta una lubricació automàtica i el greix és de 00 #, cosa que garanteix la vida útil i la precisió del cargol de plom i el carril de guia durant molt de temps.
Resultats de l'anàlisi estàtica del control lliscant superior: el diagrama de ronyó de desplaçament de l'estrès de la taula superior mostra que la tensió màxima apareix a la part superior, la tensió màxima és de 152 mpa, la deformació màxima apareix a l'extrem superior de la taula superior, la deformació màxima és de 0,15 mm
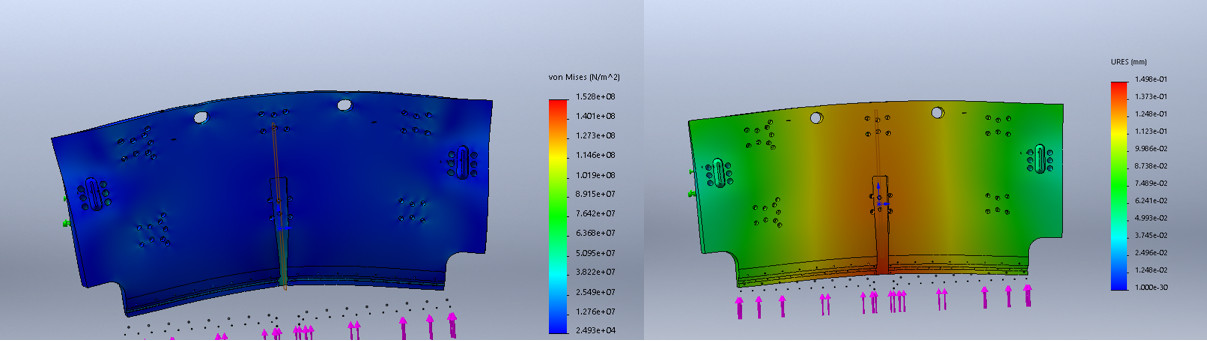
Fig. 3 resultats de l'anàlisi de desplaçament de tensió del ram
Segons els resultats de l'anàlisi d'elements finits de l'ariet, es va seleccionar l'acer Q345 com a material;Es va utilitzar soldadura blindada amb CO2;es va realitzar un tractament de tremp per eliminar l'estrès provocat per la soldadura;assegurant així la precisió, estabilitat i alta rigidesa de l'equip per a un funcionament a llarg termini.
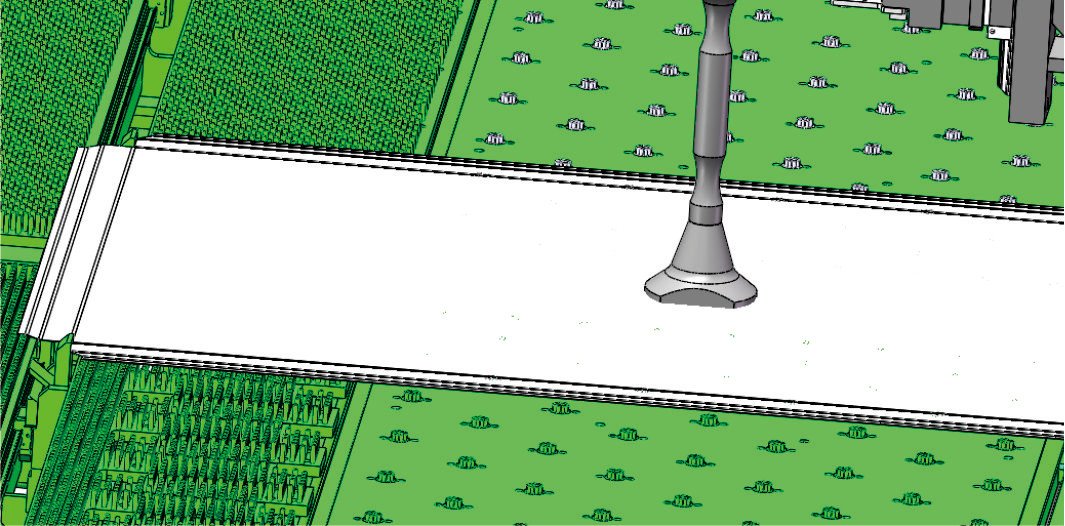
Unitat de flexió
La part d'accionament de potència de la unitat de flexió és accionada per un servomotor sense la implicació d'un sistema hidràulic, que té grans avantatges pel que fa a la reducció del desgast dels components i l'eficiència de la transmissió, d'acord amb la política d'estalvi d'energia i protecció del medi ambient defensada. per part de l'estat.
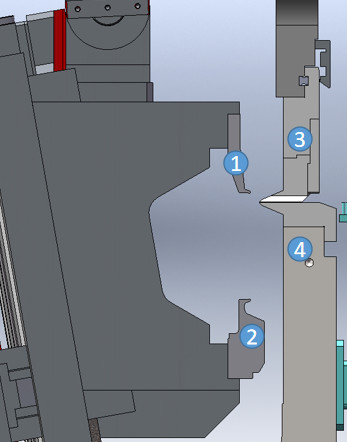
Segons la configuració de la informació del full, el sistema calcula automàticament la posició del ganivet de premsa superior 3 i controla la distància entre el ganivet de premsa superior 3 i el ganivet de premsa inferior 4 per fixar el full;segons la configuració del sistema, tant si aquesta flexió és cap amunt o cap avall, el ganivet de premsa inferior 2 o el ganivet de premsa superior 1 es controla per moure's ràpidament a la posició de flexió;segons diferents angles de configuració, el ganivet de flexió es controla per moure's a la posició calculada mitjançant la fórmula de càlcul d'angle patentada per completar la flexió.
Segons les diferents maneres de flexió, es pot dividir en flexió d'angle, flexió d'arc gran, flexió d'aplanament, etc., la flexió d'angle es divideix en flexió cap amunt i flexió cap avall.
Unitat de premsa superior
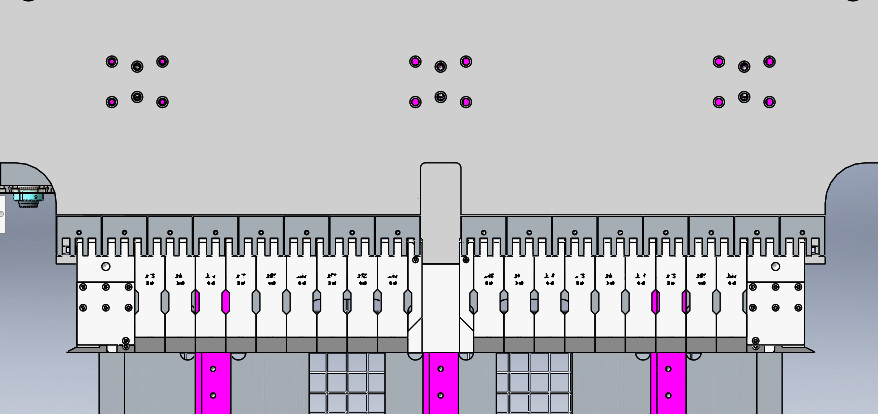
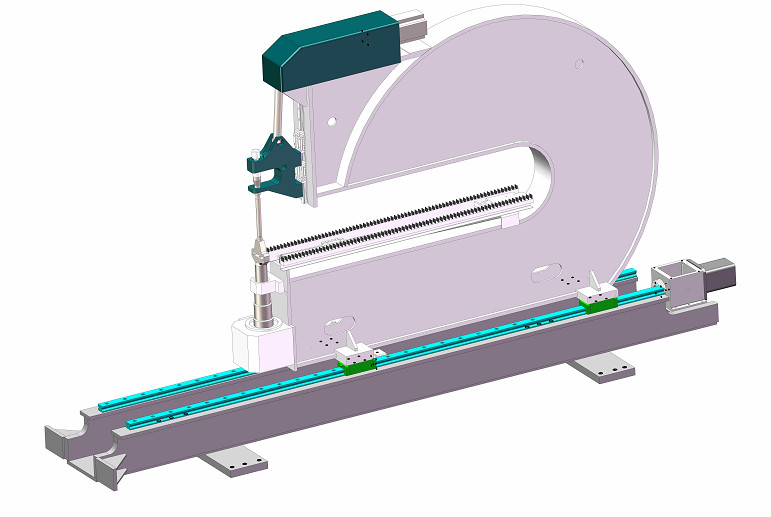
Fig.6 Unitat de premsa superior
La unitat de premsa superior: una part de tots els processos de plegat, el centre de plegat multilateral servo complet EmbC està equipat amb una unitat de premsa superior especial que es pot instal·lar i ajustar manualment per a diferents longituds de plaques.
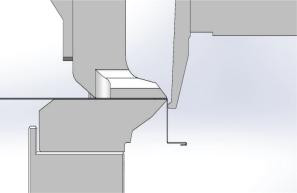
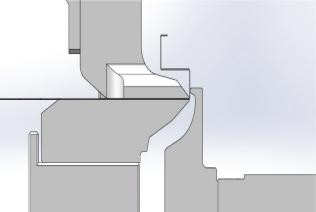
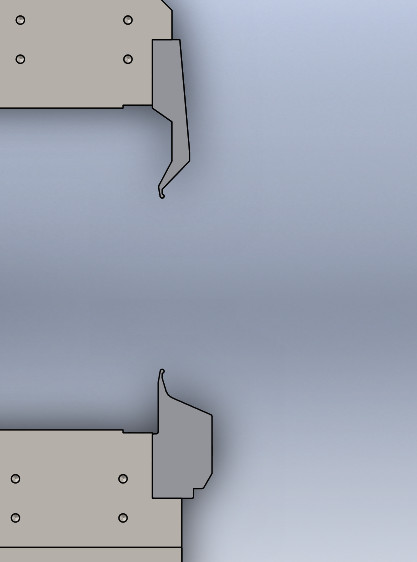
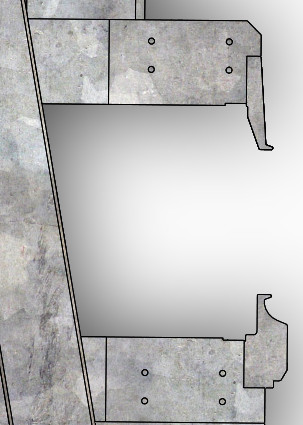
Per tal de complir els requisits de la caixa de flexió d'evitació, hem desenvolupat una matriu d'evitació especial.Abans de prémer, la part a del dau d'evitació es troba en l'estat abans de prémer al diagrama i comença l'alimentació.Després de l'alimentació, es troba en l'estat després de prémer el diagrama i comença la flexió.Després de doblegar-se, el control lliscant superior es mou.Durant el moviment del control lliscant superior, la part A es mourà automàticament a l'estat abans de prémer.Després que el control lliscant superior s'hagi mogut a la posició establerta, comença el següent moviment.
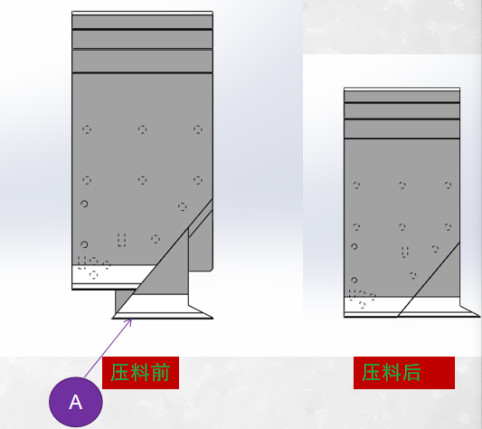
Fig.7 Evitació de la caixa de flexió
Eina
Les eines de flexió es divideixen en eines de flexió superiors i eines de flexió inferiors.Les eines de plegat especials es poden personalitzar segons els diferents requisits del client.
2. Unitat d'alimentació de plaques:
El moviment, la subjecció i la rotació de la xapa estan controlades pel robot 1, el suport 2 i el disc giratori 3 respectivament.Durant tot el procés de mecanitzat, l'alimentació de la xapa està controlada per servomotors, permetent l'automatització i el posicionament ràpid, reduint els temps de moviment i augmentant l'eficiència.Gràcies a les innovacions estructurals i l'aplicació d'un servocontrol complet, la subjecció i la rotació de la xapa és capaç de mantenir la precisió durant tot el procés de treball del centre de plegat multilateral.Per a moltes peces de treball complexes, fins i tot les poligonals, es pot garantir una precisió de rotació contínua de 0,001.
3. Unitat de posicionament de la placa:
La unitat de posicionament de la placa consta d'un passador de posicionament esquerre, un passador de posicionament dret, un passador de posicionament davanter i un passador de posicionament posterior;els pins de posicionament esquerre i dret col·loquen la placa a l'esquerra i a la dreta.El passador de posicionament frontal i el passador de posicionament posterior controlen la posició davantera i posterior de la placa i asseguren que la placa sigui paral·lela als ganivets de premsa superior i inferior, que s'utilitza per garantir la precisió de posicionament de la placa.
La unitat de posicionament de la placa pot col·locar automàticament la placa i completar automàticament la flexió multilateral alhora, la qual cosa redueix molt el temps del cicle de flexió, controla l'error de cisalla de la placa a la primera flexió i garanteix la precisió de la flexió.
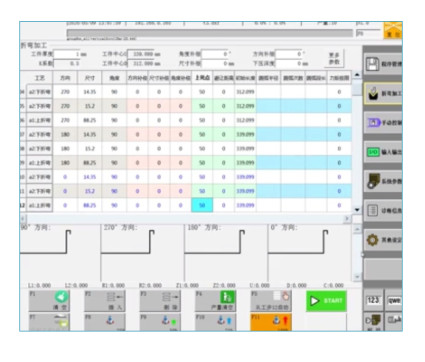
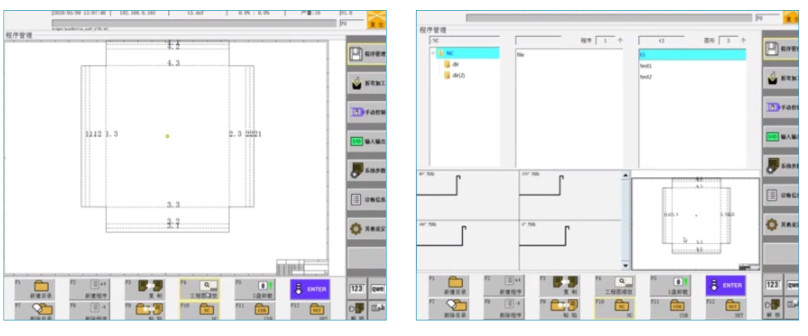
4.Sistema CNC
R: Els sistemes i programari CNC desenvolupats conjuntament es poden aplicar i gestionar de manera ràpida i senzilla
B: Característiques clau.
a) .Mètode de control de bus EtherCAT amb alta resistència a les interferències
b) Admet programació directa, les dades de plegat per a cada pas es poden introduir al formulari
c) Suport per a flexió corba
d) Servocontrol totalment elèctric
e) Suport per a la compensació de flexió
f) Suport a la programació bidimensional
Funció de programació 2D, importació de dades de dibuix 2D DXF, genera automàticament el procés de flexió, la mida de flexió, l'angle de flexió, l'angle de rotació i altres dades.Després de la confirmació, es pot dur a terme un processament automàtic de flexió
Llista de la part principal
| No. | Nom | Marca |
| 1 | Marc | Saviesa |
| 2 | Eina | Saviesa |
| 3 | Unitat de plegat | Saviesa |
| 4 | Sistema CNC | Saviesa |
| 5 | Servomotor | Saviesa |
| 6 | Servoconductor | Saviesa |
| 7 | Ferrocarril | Saviesa |
| 8 | Cargol de boles | Saviesa |
| 9 | Reductor | Taiwan |
| 10 | Trencador | Schneider |
| 11 | Botó | Schneider |
| 12 | Part elèctrica | Schneider |
| 13 | Cable | Yicu |
| 14 | Interruptor de proximitat | Omron |
| 15 | Coixinet | SKF/NSK/NAICH |
4) El disseny, la fabricació, la inspecció i la instal·lació de la màquina-eina compleixen les normes següents.
1, GB17120-1997
2、Q/321088JWB19-2012
3, GB14349-2011
Llista de peces de recanvi i eines
| No. | Nom | Qt. | Observació |
| 1 | Caixa d'eines | 1 | |
| 2 | Instal·leu el coixinet | 8 | |
| 3 | Iclau hexagonal interior | 1 conjunt | |
| 4 | Pistola d'avituallament manual | 1 | |
| 5 | Manual del sistema CNC | 1 | |
| 6 | clau oberta | 1 |





